Introduction
Today, I’m looking at section 1.4 of Introduction to Linear Optimization. The goal of this section is to find “useful geometric insights into the nature of linear optimization programming problems”. I will recreate the examples from the book in R.
In the following examples, we want to visually examine linear programming problems in order to:
- See what the objective function being optimized looks like
- Visualize the feasible set based on the given constraints
- If possible, visually identify solution.
Example 1
This is example 1.6 on page 21 of Introduction to Linear Optimization (Bertsimas and Tsitsiklis 1997, 27). Our aim is to minimize the function \(-x_1-x_2\) subject to the following constraints:
\[\begin{align*} x_1+2x_2 \leq 3 \\ 2x_1+x_2 \leq 3 \\ x_1,\ x_2 \geq 0 \end{align*}\]
Visualizing the feasible set
First, we want to see what sorts of values the feasible set can take on. We begin by defining our objective function for later use:
#Objective function
obj.fun=function(x) -x[1] - x[2]Next, we plot our constraints and determine which values of \(x_1\) and \(x_2\) fall into the feasible set. Note that both \(x_1\) and \(x_2\) are bounded above by \(3\) and below by \(0\) by the problem definition, so we restrict our attention to \(x = (x_1,x_2) \in [0,3] \times [0,3]\).
We will place \(x_1 \text{ and } x_2\) on the x and y axes, respectively. We draw lines between the intercepts of the constraints by noting that \(x_1+2x_2=3\) at points on the line connecting \((0,1.5)\) and \((3,0)\). Likewise, we represent \(2x_1+x_2=3\) by points on the line connecting \((1.5,0)\) and \((0,3)\). Since \(x_1 \geq 0\) and \(x_2 \geq 0\), the area between these lines and the axes represents the feasible set.
# setting up vertices for shading with polygon
x.vert=c(0,1.5,1,0)
y.vert = c(0,0,1,1.5)
plot(1,xlim=c(0,3),ylim=c(0,3),xlab="x1",ylab="x2",lty=2,lwd=1.5,
main="feasible set for linear optimization problem")
lines(c(0,3),c(1.5,0),lwd=2,col="blue")
lines(c(0,1.5),c(3,0),lwd=2,col="blue")
polygon(x.vert,y.vert,col=rgb(1,0,0,0.5))
abline(0,-1,lty=4)
abline(1,-1,lty=4)
abline(2,-1,lty=4)
points(1,1,pch=19)
text(1.45,1,"optimal point (1,1)")
text(0.5,0.5,"feasible set")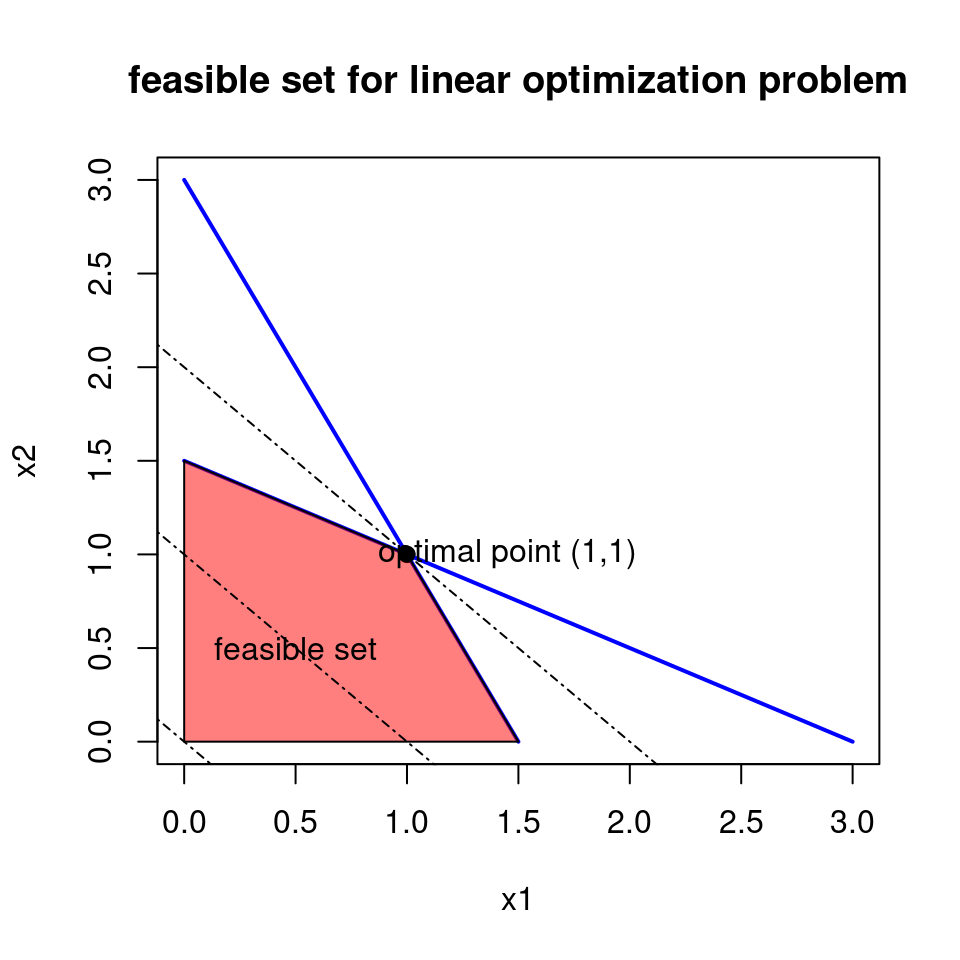
The red shaded region represents the feasible set. The blue lines represent the two constraint inequalities.
Note that we want to minimize \(-x_1-x_2\) which is equivalent to maximizing \(x_1+x_2\) within the given constraints. It is clear from the plot that the point \((1,1)\) maximizes \(x_1+x_2\) within the feasible set. Putting this into the original, we obtain \(-x_1-x_2 = -1-1 = -2\), so \(-2\) is the minimum.
Plotting this was not entirely straightforward. The textbook image is easier to read:
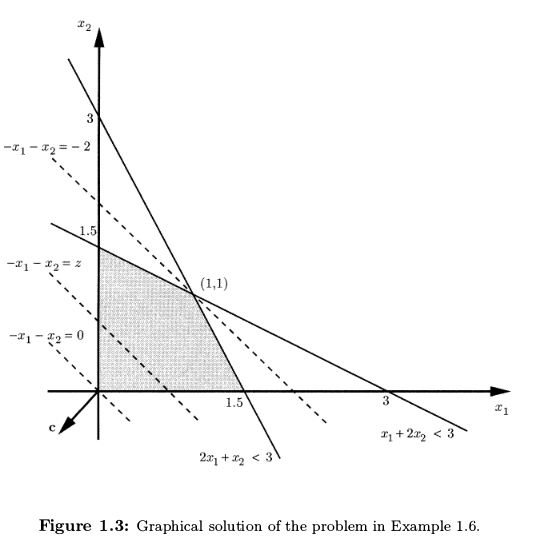
textbook image
In particular, I liked that the lines extended past the axes, and I thought the lines were well-labeled. That was fairly difficult for me to do in the base R plotting system. I’m sure these things can be done in the basic R plotting package. I will tackle that in a future post.
Optimizing with R’s built-in package
We conclude by quickly verifying the result we obtained through graphing by using R’s constrOptim() function.
Note that the gradient is \(\nabla f(x)= \begin{pmatrix}-1\\-1\end{pmatrix}\). We choose a starting value of \(\begin{pmatrix}0.1\\0.1\end{pmatrix}\) which is in the feasible set. In the constrOptim function, the constraints are defined such that ui %*% theta - ci >= 0. To put the constraints in this form, we define \(\textbf{ui}=\begin{pmatrix}-2 & -1\\ -1 & -2\end{pmatrix}\) and \(\textbf{ci}=\begin{pmatrix}-3\\-3\end{pmatrix}\). We these arguments, we use the constrOptim() function like so:
grad=function(x1,x2) c(-1,-1)
minim=constrOptim(theta=c(.01,.01),f=obj.fun,grad=grad,
ui=rbind(-1*c(2,1),-1*c(1,2)),ci=-1*c(3,3))And we obtain the following values for the minimizer and minimum.
## $par
## [1] 1 1## $value
## [1] -2This corresponds to what we obtained by plotting the constraints. My next post on linear optimization will look at another example and will attempt to generate a more informative plot.
References
Bertsimas, Dimitris, and John N. Tsitsiklis. 1997. Introduction to Linear Optimization. Third printing edition. Belmont, Mass: Athena Scientific.